
17
Feb
DEVELOPMENT OF AN AFFORDABLE MYOELECTRIC HAND FOR TRANSRADIAL AMPUTEES
-
Project Start Date
-
Timeline
Introduction
Upper limb amputations seriously affect the patient’s life by restricting their ability in performing various tasks. Prosthetic hands are considered as the primary method to reinstate the lost capabilities of such amputees. However, the presently available prosthetic devices are unable to fulfill the requirements of users due to their excessively high cost, limited functionality, heavyweight, unnatural operation, and complexity. This work presents an affordable and simple control based myoelectric hand for transradial amputees. The hand setup mainly consists of self-designed surface electromyography (sEMG) sensor, a microcontroller unit and a five-fingered, intrinsically actuated 3D printed hand for dexterous operation. The developed hand implemented with proportional control scheme was successfully tested on five amputees (with missing lower forearm) for performing grasping activity of different objects.
Approach/Methods
Design of sEMG sensor
• A low-cost and sensitive surface EMG sensor was designed with skin interface, signal conditioning circuitry, and power supply unit encased in a single structure.
• The tuned RC parameters based envelope detection scheme employed in the sensor enables faster as well as reliable recognition of EMG signal patterns regardless of its strength and subject variability.
• The output performance of the developed sensor was compared with a commercial EMG sensor regarding signal-to-noise ratio (SNR), amplitude sensitivity, and response time.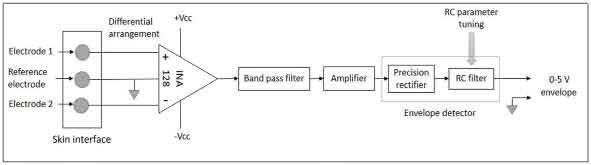

Results
Prosthetic hand operation :
• The developed myoelectric hand was successfully tested on five different transradial amputees for performing grasping of various objects.
• The amputees with their different level of muscular contractions (i.e., the intensity of sEMG signal) were able to control the grasping force of the prosthetic hand fingers to grab and hold various objects, without any priortraining.
• An experiment was performed in which response time (i.e., Closing/opening time) of the prosthetic hand with both the sensors was determined from their recorded video of hand operation.
Conclusion
In this work, sensitive EMG sensor based myoelectric prosthetic hand has been developed for transradial amputees. The selfdesigned sensor was capable of detecting different muscular contractions from amputees. The EMG signal from the sensor was utilized for real-time controlled operation of 3D printed hand prototype. A successful trial of the developed myoelectric hand was made for five patients with missing lower forearm. Amputees were able to control the grasp force of hand with their different EMG signal strength (i.e., muscular contraction). The implementation of a proportional control strategy provides a smooth, faster and intuitive operation of the prosthetic hand. As compared to the available prosthetic hands, although the proposed hand provides a limited number of grip patterns but offers fasteroperating speed and fine grasping to fulfill basic needs of an amputee at an affordable cost without active training sessions.
Publications
• A. Prakash, S. Sharma, and N. Sharma, “A compact-sized surfaceEMG sensor for myoelectric hand prosthesis,” Biomed. Eng. Lett.,Aug. 2019. 2020.
Patents
A. Prakash, B. Kumari, S. Sharma & N. Sharma “EMG sensor for prosthetic hand control,” Indian Patent Ref. No. 201811016601, May 2, 2018 (status: published). • A. Prakash, S. Sharma & N. Sharma “FMG sensor for hand prosthesis application,” Indian Patent Ref. No. 201911043042, May 2, 2018.
-
recent projects
-
 Design, Analysis and Fabrication of Prototype Magnetorheological fluid dampers for semi-active vibration control
Project Start:
Design, Analysis and Fabrication of Prototype Magnetorheological fluid dampers for semi-active vibration control
Project Start: -
Development of waste heat recovery system with TEG and PCM for electrical applications
Project Start:
-
Reforming of GHG: CO2 and CH4 over nanosize Ni-based catalyst to syngas
Project Start:
-
-
other projects